La commune d’Odars (31), située à une vingtaine de kilomètres de l’agglomération toulousaine, a été choisie comme zone-test privilégiée du programme Archéodrone, en raison de la bonne connaissance acquise sur l’histoire de l’occupation de son territoire à travers différents programmes de recherche précédents et en cours, comme l’ANR ModelEspace portant sur la spatialisation des informations contenues dans les compoix médiévaux et modernes, ou encore le Chantier Histoire.
Un premier vol a été réalisé sur la commune d’Odars le 01/02/2012, au matin, sur la parcelle dénommé « L’Estanque », ayant révélé en photographie aérienne des traces de parcellaires fossiles. Cette parcelle présentait alors une couverture du sol en semis de céréales déjà bien poussés, assez denses et couvrants, hauts d’environ 10 cm.
Le vol a été réalisé autour de 10H du matin, par une température atmosphérique de 0.5°C et 98% d’humidité relative.
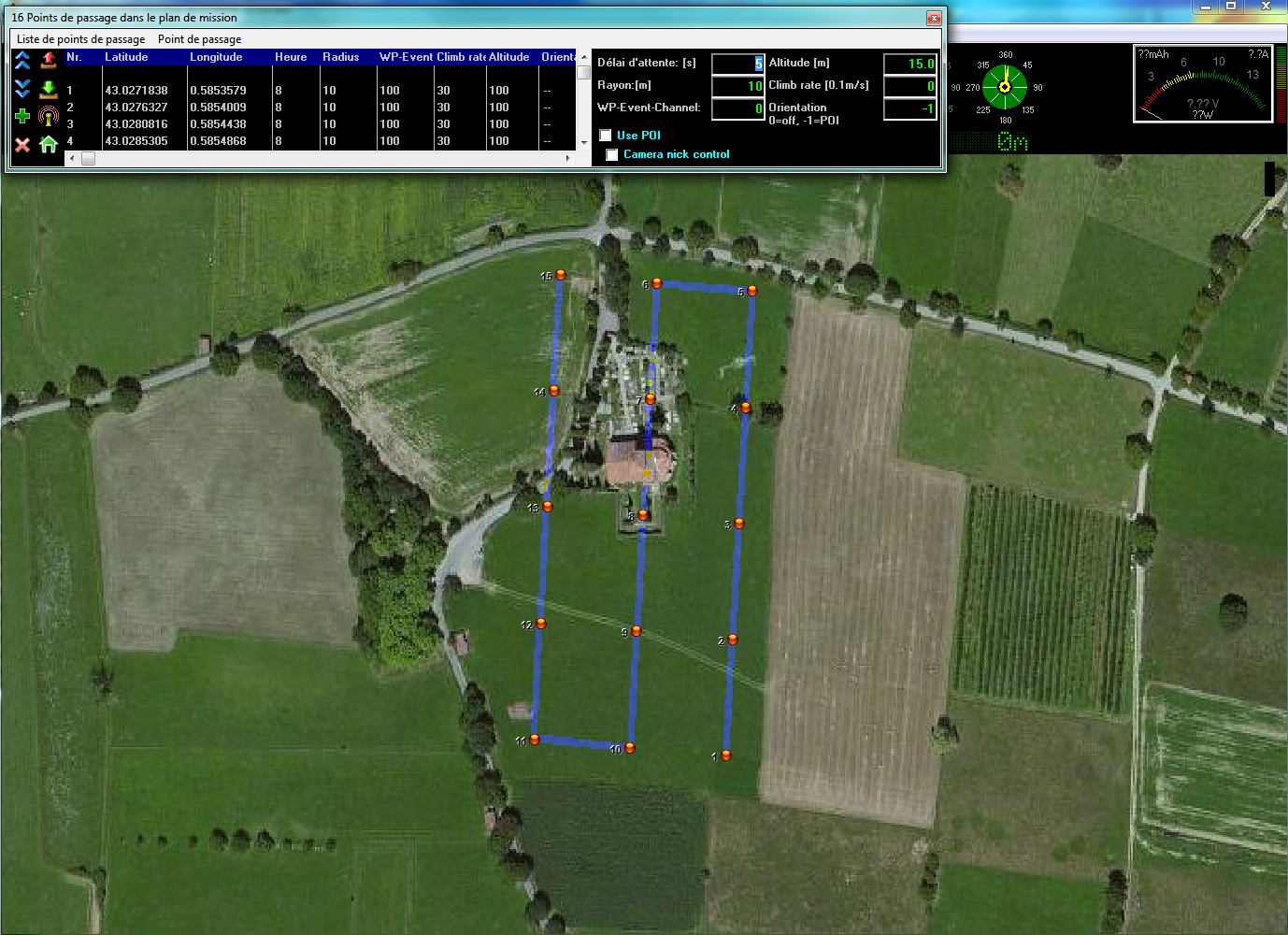
Deux survols de cette parcelle ont été réalisés à deux altitudes différentes : 60 et 120 m. Un temps d’attente de 10 secondes était programmé sur chaque waypoint. Le déclenchement manuel des clichés thermiques a été réalisé.
Sur le vol à 60 m d’altitude, des anomalies thermiques linéaires ont pu être identifiées sur les clichés thermiques, correspondant peut-être à d’anciennes limites parcellaires matérialisées par des fossés (?).
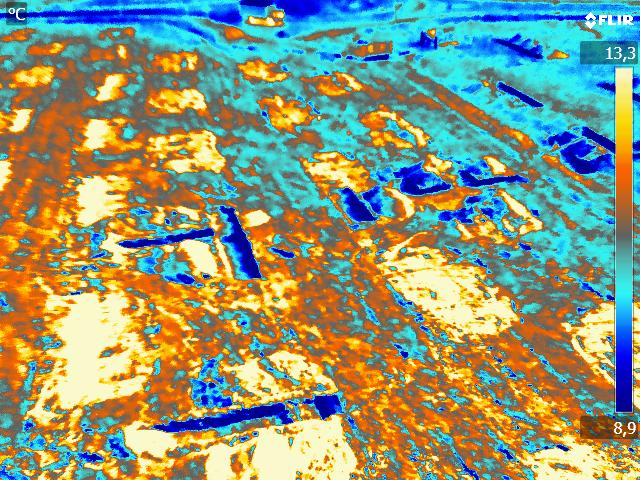
Le vol à 120 m d’altitude a également révélé des anomalies grossièrement quadrangulaires sur plusieurs clichés (voir photo ci-dessous).

Image visible
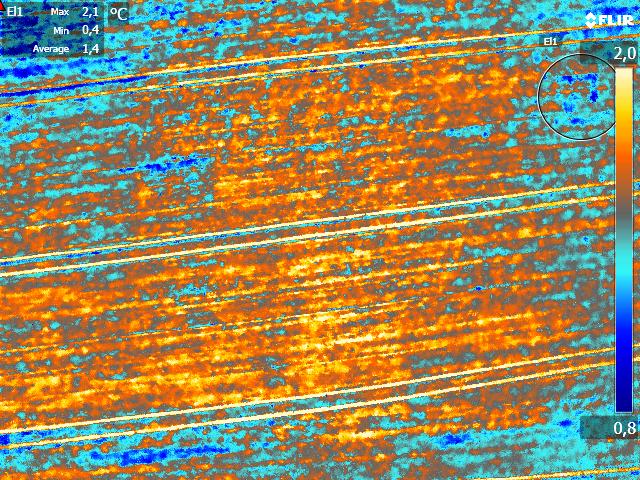
Anomalie froide quadrangulaire